


林業機械の現在地【前編】 自動化・機械化はどこまで進んでいる?
2023/10/04




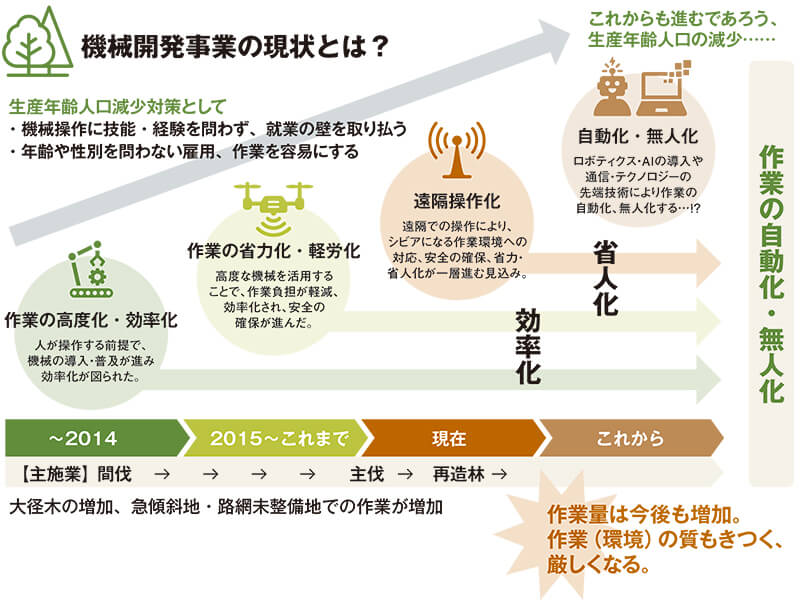
林業の機械化が当たり前になりつつあり、一台で2~3役をこなす高性能林業機械の普及も進んだ今、これから林業機械はどのような方向で開発が進んでいくのかを林野庁と林業機械化協会に伺った。
林野庁は
何を目指す?
参照:「林業機械の自動化・遠隔操作化に向けて」林野庁資料
林野庁の策定した『林業イノベーション現場実装推進プログラム』では、伐採・搬出の将来像として、自動化技術の導入によって伐採〜運材作業を効率化し、木材の生産性を2倍以上に向上する。また死亡災害の約7割を占める伐倒作業における労働災害の撲滅を目指すとしている。
どうなる林業機械
開発の最新動向
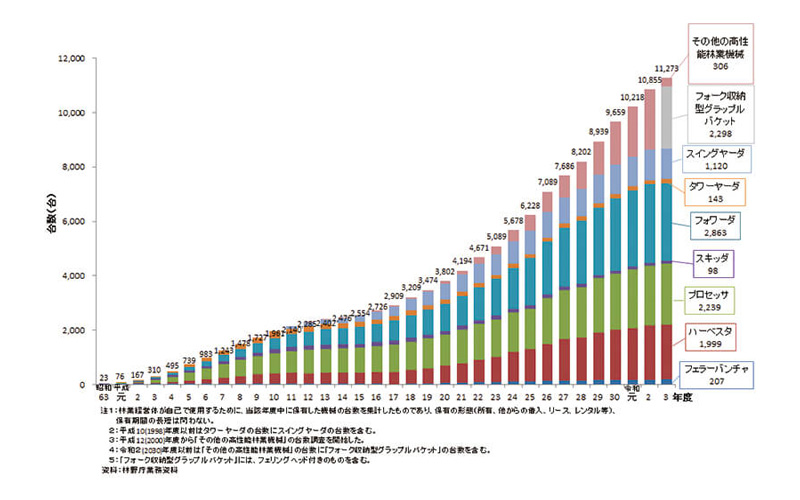
日本において林業への高性能林業機械の導入が始まったのはいまから約40年前の昭和60年代。その後約四半世紀かけて全国の保有台数は5000台を突破し、令和3年度には1万1000台となった。
林業の生産性向上を図るためには、林道や森林作業道などの路網と高性能林業機械等を組み合わせた効率的な作業システムの構築が不可欠とされる。各地域では、路網に見合った機械の導入や作業システムの導入が進んでいることだろう。
ここ10年で、掴み、掘削、転圧等複数の機能を持ち、作業道の作設を効率的に行うことができる「フォーク収納型グラップルバケット」の保有台数が急速に増えたと見られ、令和3年度には、これまで「その他の高性能林業機械」と区分されていたが、新たな項目として追加された。
高性能林業機械の保有状況の推移(令和3年度)
高性能林業機械の動向について、林野庁の安藤暁子さんにお話を伺った。
「林野庁では昭和63年から毎年度、都道府県に協力いただき、高性能林業機械を使用して素材生産等作業を行う林業事業体等を対象に、保有状況調査を行っています。
年々、保有台数は右肩上がりで増えています。調査対象となっている林業事業体等の数は約2600で、その内訳は、企業が63.7%、森林組合が27.8%と大半を占めています。
個人での保有は5%以下ですが、事業量や費用対効果、安全性、生産性などを考慮しながら、機種の選択や導入の判断をされているのでしょう」。
自動化・遠隔操作化技術
どこまで進んでいる?
同庁の一重(ひとえ)喬一郎さんも続けて、これまでは“人が機械を操作することを前提”とし進められてきた機械開発の変化について話してくれた。
「近年は危険な場所に人が入らなくて済むよう、遠隔操作または自動で作業できる機械の開発を進めています。
実用化は遠隔操作の機械が先行しており、油圧集材機とラジコン式架線式グラップルを組み合わせた集材システムや、ラジコン式下刈り機械が実用化されています。
その一方で、自動化技術はよりハードルが高く実用化には至っていませんが、フォワーダなどの自動化に向けた技術開発が進んでおり、いずれは林業現場で自動運転する機械を普及させ、林業の生産性を飛躍的に向上させていきたいと考えています」(一重さん)。
開発の動向について、林業機械化協会の石井晴雄さんは次のように話す。
「現在、急激な木材需要の変化に対応するため、伐採・集材・運材・造林作業の自動化と遠隔操作技術、森林内で利用可能な通信技術など、自動化・遠隔操作化に向けた開発と実証が林野庁補助事業として積極的に進められています」。
例えば、より急斜面でも作業できるラジコン式伐倒作業車が開発・実証されているようだ。他にもどのような開発が行われているか、事例を見ていこう。
開発事例1 搬出・運搬の自動化

目視外無人走行技術を搭載したフォワーダ
走行環境の変化にも対応
林内の車両から離れた場所から遠隔通信を行い、フォワーダの監視と操作を行うための林内通信インフラの構築とユーザインタフェースの開発を行う。また崖崩れやぬかるみなど環境変化への対応ができるよう実証を進めている。さらに森林作業道の高精度3Dマップ化により自動走行の精度を向上させる実証も行う。
株式会社諸岡/パナソニックアドバンストテクノロジー株式会社/国立研究開発法人森林研究・整備機構/国立大学法人東京農工大学/株式会社国際電気通信基礎技術研究所
●目視外自動運転・目視外遠隔操作の早期実現に向けた遠隔監視・操作技術の開発・実証およびコスト分析
●急勾配・ぬかるみにおけるフォワーダ走行の安定化
●予防安全機能の搭載
開発事例2 下刈り機械の自動運転化
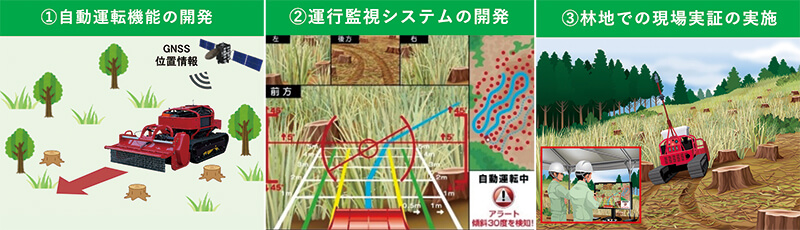
自動運転機能などを追加搭載
下刈り作業の軽労化・省力化・効率化
既存開発の下刈り機械に、自動運転機能を追加搭載し、遠隔操作システム、運転アシスト機能等を追加。下刈り機械の自動化に向けた開発・実証を行う。
株式会社NTTドコモ/株式会社筑水キャニコム/阿蘇森林組合
●草丈により伐根等の障害物が見えない現場でも、下刈り機械の状態を監視できるようにARナビゲーションを搭載した運行監視システムの開発を行う。
●実証実験前に、地拵え後の伐根等の障害物の位置情報を踏まえ、「適切な植栽密度」「最適な植栽位置」を設定。林地の座標情報を計測し、走行ルートデータを作成。データをシステムの登録した下刈り機械が、走行ルートデータとGNSSの現在位置情報に基づき、遠隔自動運転を行う。
開発事例3 伐採・地拵え作業の機械化
傾斜角度15〜30度の中傾斜地での
伐採と地拵えを機械化
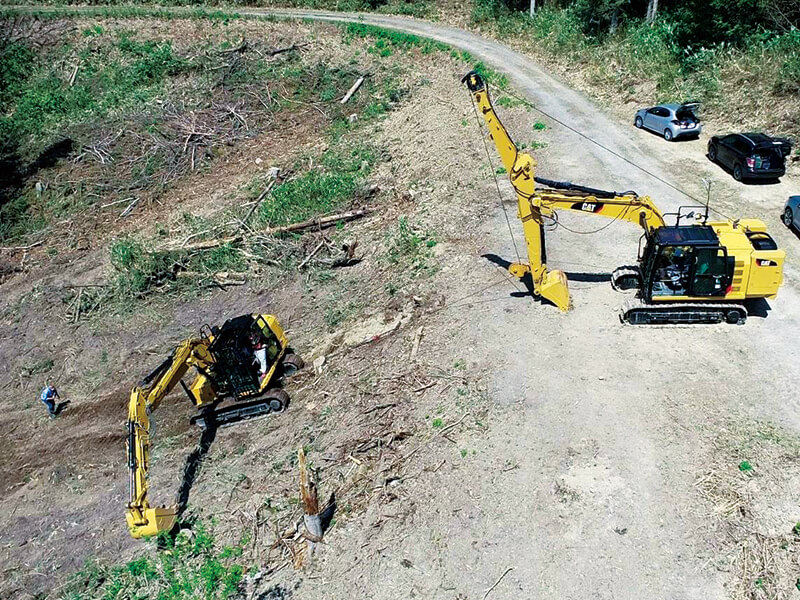
日本版ウインチアシストシステムの事業規模での実証と改良により、傾斜角度15〜30度の中傾斜地における伐採、地拵え作業を機械化。
住友林業株式会社/日本キャタピラー合同会社/有限会社天女山
●導入・稼働にかかるコストと、生産性や作業性の向上効果から、機械導入にかかる費用対効果を明らかにする。
開発事例4 集材作業の自動化

架線集材作業でAI技術を活用!
生産性・作業性のさらなる向上を目指す
昨年度に「先進的林業機械緊急実証・普及事業」で実証した、プロセッサオペレーターがキャビン内で造材と集材を1人で行える新たな架線集材システムを活用した集材・造材マルチワークシステムの高度化。
イワフジ工業株式会社/中井林業
●AI画像認識で木を見つけ、集材対象木の直上付近で架線式グラップルが停止する自動引込みシステムの改良を行い、横行から引込みまで自動化を拡大する実証。
●荷掛け操作は、ARグラス中で立体映像に表示した3DCGの架線式グラップルをトング開/閉、左右旋回させ、実機の姿勢をリアルタイムでデジタルツイン映像表示し、生産性・作業性の向上を図る。
●架線式グラップルの適用外エリアで、急斜面を移動してのロージングブロック&スリングワイヤーの荷掛け時に携帯が容易な小型の位置決め用サブラジコンを開発し、作業性・携帯性の向上を図る。
事例出典:「林業機械の自動化・遠隔操作化に向けた開発・実証事業の概要」「戦略的技術開発・実証事業の概要」
林野庁資料
話してくれた人
林野庁 森林整備部 研究指導課
技術開発推進室
増田 義昭さん
安藤 暁子さん
一重 喬一郎さん
一般社団法人林業機械化協会
石井 晴雄さん
栗林 晃さん
取材・文:脇谷美佳子
FOREST JOURNAL vol.17(2023年秋号)より転載














