


林業現場にもテレワークの導入を! 不整地運搬車の遠隔操作に成功、作業負担の軽減へ
2021/04/07




労働人口の減少・高齢化が問題となっている建設・農林業界。スマートフォンで操縦できる遠隔操作技術の開発で、現場のスマート化が一歩前進。安全性の向上、作業負担が期待される。
遠隔操作の導入で
オペレーター不足を解消へ
建設・農林業分野では労働人口の減少や高齢化が社会問題となっており、生産性の向上や人手不足の解消は大きな課題となっている。新型コロナウイルスの蔓延により人の移動が制限され、オフィスの仕事はテレワークに変わろうとしている中、林業現場のテレワークはなかなか進んでいないのが現状だ。
また、自動車をはじめ建機・農機の自動化も進んではいるが、様々な法規制をクリアするにはまだまだ時間がかかる見通しだ。
このような背景から、株式会社諸岡は現場のオペレーター不足の解消や安全作業の実現に向けた遠隔操縦の開発に取り組んできた。これまで危険な場所では、オペレーターが重機に乗らず、数百メートル離れた場所から目視でラジコン操縦を行っていた。
今回の実証実験では数十キロ離れた場所から、ARAV社が開発したシステムにインターネットで接続。スマートフォンの画像と操作だけで遠隔操縦ができることを確認した。
スマートフォンで簡単!
直感で動かせる遠隔操縦
本機械と操作の主な特徴は以下の通り。
12km離れた場所から操縦可能
本機械は諸岡製ゴムクローラ運搬車MST-2200VDで電子制御により走行するモデル。

本機の稼働場所は諸岡Ami R&D Center(茨城県稲敷郡阿見町飯倉)で、スマートフォンによる遠隔操縦場所は諸岡本社(茨城県龍ケ崎市庄兵衛新田町)で行う。両者は直線距離で約12km離れている。
タッチパネルで運搬車を操縦!
遠隔操縦システムについては、まずARAV社のWeb Controllerにインターネットで接続。ID・パスワードを入力すると、スマートフォンに機械からの映像と操作パネルが現れる。

タッチパネルで操作
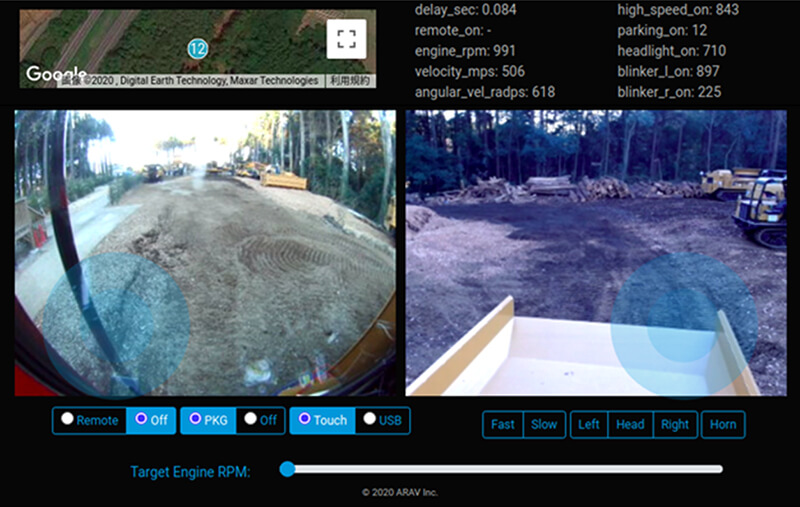
タッチパネル画面映像
タッチパネルを操作することにより、警告音・ エンジン回転数・ヘッドライト・ウインカーなどの操作と、ダンプの昇降や前後左右の走行操作が可能。(今回は安全の為エンジンのON・OFFは現地で実施)現行の4G環境でもタイム差を極力低減した遠隔操作を実現し、アップダウンのあるテストコースを約200m走行した。

遠隔操作によって、走行している無人運搬車
現行のシステムを利用すれば数千キロ離れた場所からの遠隔操縦も可能。今後両社は現場において本技術の検証を継続し、建設・農林業分野の「現場のテレワーク」実現に向け技術開発を進めていく予定だ。
問い合わせ














